13.8.2023.
Mala škola za ROV pilota
ROV ili daljinski upravljano vozilo

Uvod
Mnogi su hrvatski inžinjeri, ronioci pa i poneki piloti helikoptera otišli iz Hrvatske i potražili pravednije, poslovnije i bolje plačene prilike. Jedan od najbolje plačenih poslova u offshore industriji su piloti ROV-a bez kojih je ova industrija nezamisliva. Poslovićno vrijedni i snalažljivi Hrvati brzo su savladali ne samo Engleski jezik nego i sve procedure, doškolovavanja i pronalazak juniorskog staža za ROV pilote. Danas ih je razasuto po svijetu već priličan broj i svi su jako cijenjeni u svom poslu. Autor ovog tekta jedan je od njih.
ROV ili Remote Operated Vechicle
Čovjek od davnina stremi morskim dubinama ali tek u današnje vrijeme i uz današnju tehnologiju je to postalo moguće.
Počeci razvoja ROV-a povezani su sa razvojem podmornica i pokušajima njihovog spašavanja. Zbog dubina koje su roniocima bile nedostižne (a također su u ranim danima offshore industrije oboljevali i pogibali u velikom broju) te je bilo potrebno razviti opremu koja bi to omogučila bez ljudske posade ili samih ljudi.
Iako je prvi ROV napravio Francuski ronilac I podvodni fotograf Dimitri Rebikoff najviše je u 60-im I 70-im godinama prošlog stoljeća napravila Američka mornarica. Oni su razvili prva podvodna vozila bez ljudske posade. Za daljnji razvoj podvodnih vozila zaslužan je razvoj industrije nafte I plina (Offshore Industry) u 70-im godinama prošlog stoljeća.
Razvojem te industrije na moru, posebno na Sjevernom moru, paralelno se razvija I svijet podvodnih vozila u kojem prednjači Velika Britanija sa nekoliko tvornica za proizvodnju istih. Kako se ta industrija razvijala tako su se počeli pojavljivati i centri za obuku operatera i tehničara tih istih vozila. Danas postoje centri za obuku po cijelom svijetu iako sve velike kompanije imaju svoje centre za obuku.
ROV ili Remoted Operated Vehicle je vozilo na daljinsko upravljanje bez ljudske posade koje je sa povrsinom povezano fleksibilnim kabelom (tether-om ili unbilical-om) neutralne plovnosti preko kojeg komunicira sa operaterom koji se najčešće nalazi na brodu. Preko tog kabela se obavlja sva komunikacija, prenos videa, I ostalih podataka potrebnih za razne zadatke koje ROV obavlja pod morem.
ROV klase
Četiri su osnovne klase podvodnih vozila prema veličini:
- Mini ili prenosni (Mini or portable)
- Obsevacijski Observation class)
- Lagani radni Light workclass)
- Radni (Workclass)
Osim ovih kategorija možemo spomeniti i AUV (Autonomuos underwater vehicle) ili podvodno vozilo koje nije fizički povezano sa površinom. U ovu kategoriju možemo ubaciti I male ronilice popularno nazvane podvodni dron (Sea drone), kojih danas ima toliko da ih je teško pobrojati. Oni isključivo služe za osobnu upotrebu i ograničenih su sposobnosti kako dubine tako i autonomnosti.
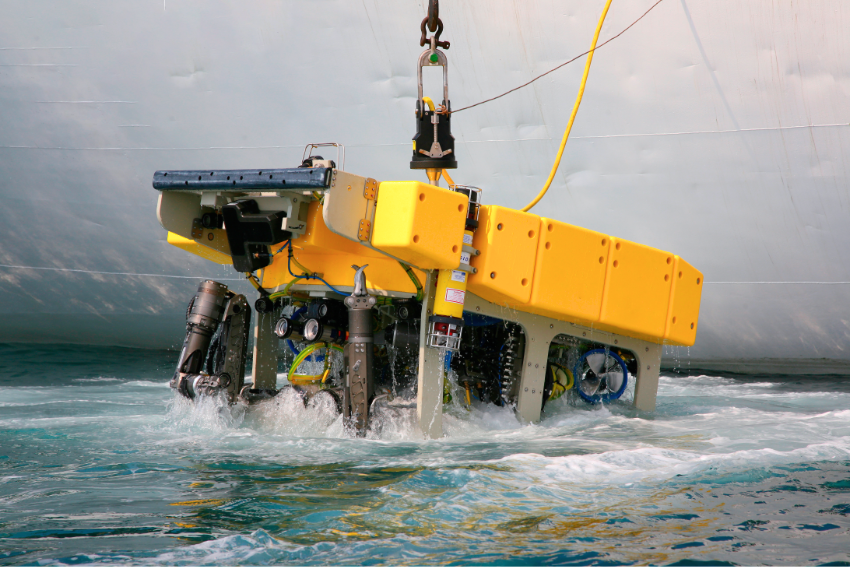
Svaki ozbiljniji posao pod morem ne bi bio moguć bez podrške broda i to najčešće Dinamički Pozicioniranim (dynamic positioning) brodom. Takva vrsta broda je potrebna zbog održavanja pozicije broda na istom mjestu za vrijeme trajanja podvodnih radova ili npr. u slučaju inspekcija plinovoda taj isti brod prati podvodno vozilo dok obavlja inspekciju.
Poslovi na kojima susrećemo podvodna vozila pružajući podršku različitim idustrijama uključuju radove na naftnim i plinskim poljima, na farmama vjetrenjača na moru, traganje i spašavanje, znanstvena istraživanja, čišćenja podmorja od minsko eksplozivnih sredstava, podrška roniocima, razne inspekcije kao npr. plinovoda, brana, itd.
Operateri podvodnih vozila (isključujući najmanju kategoriju mini ili prenosnu) su profesionalci koji najčešće rade u timu od troje ljudi. Glavni od njih je Supervizor i on je odgovoran za sigurno obavljanje svih poslova uključujući popravak, održavanje, operacije pod morem te spuštanje i povratak na palubu broda (Launch & Recovery). Operateri ROV-a se zovu piloti/tehničari. Njihov je posao sigurno upravljanje podvodnim vozilom, njegovo održavanje i popravak. Školovanje za pilota/tehničara je dugotrajan proces i kako s vremenom sakupljaju iskustvo uz konstantno usavršavanje mogu napredovati kroz pojedine nivoe. Piloti/tehničari su osobe najčešće tehničke naobrazbe jer za obavljanje posla je potrebno znanje mehanike, elektronike. Kroz posao I popravke se susreću sa visokim naponom, visokim hidrauličkim tlakom I problemima sa optičkim prijenosom podataka. To je jedno jako zanimljivo zanimanje koje zahtijeva konstantno učenje i adaptaciju na različite ljude i običaje.
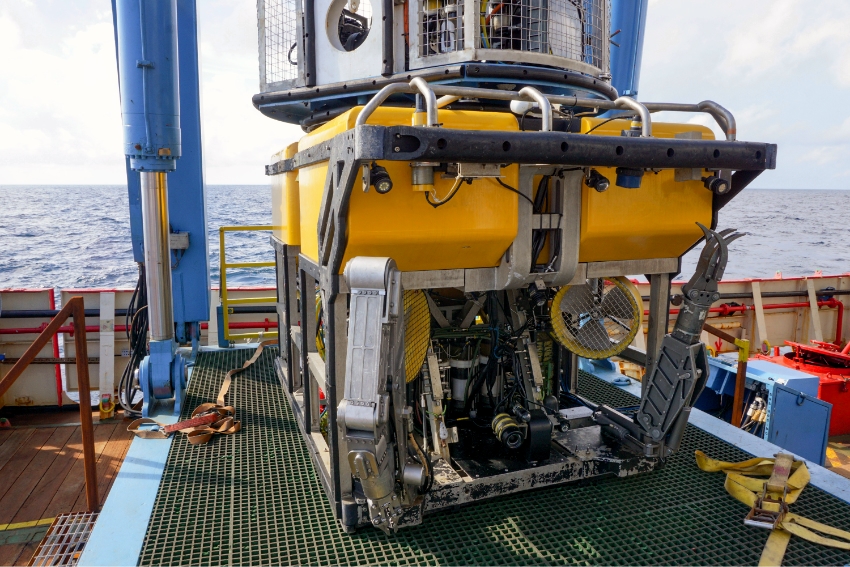
Dijelovi ROV-a
Podvodno vozilo se sastoji od:
- okvira,
- uzgona (najčešće neka vrsta laganog polimera),
- motora,
- pumpi,
- robotskih ruku,
- propelera,
- kamera,
- svijetala,
- sonara te raznih senzora prilagođenih različitim podvodnim aktivnostima.
Dok na površini ROV može težiti i do 10 tona u moru može biti potpuno neutralnog uzgona. Njegov uzgon se može prilagoditi dodavanjem ili oduzimanjem težine ovisno o dubini rada u zavisnosti od broda ili o vrsti same operacije koju obavlja (ukoliko radi na velikoj dubini onda ćemo ga naštimati oduzimanjem blokova od olova da bude pozitivnog uzgona pa da u slučaju kvara ispliva na površinu).
Na podvodnom vozilu se nalazi dosta senzora. Senzore možemo podijeliti na one koji se koriste za navigaciju i one koji služe za obavljanje podvodnih zadataka. Senzori za navigaciju uključuju DVL (Doppler velocity log) uređaj koji na dubini od 0-30 metara od dna daje mogućnost prikaza dubine, pravca i brzine kretanja, visine od morskog dna te temperature mora. MRU (Motion Reference Unit) omogućuje prikaz pravca i nagiba vozila po uzdužnoj i poprečnoj osi. Dubinomjer za očitanje trenutne dubine. Visinomjer za očitanje visine od morskog dna. Transponder i Responder, hidroakustični pošiljatelj i primatelj signala za određivanje pozicije pod morem.
Senzori za obavljanje podvodnih zadataka su usko vezani za određene zadatke jer postoji na desetke uređaja ako ne i stotine. Spomenuti ćemo neke od njih. Bathymetry služi za mapiranje morskog dna. Phins služe za iznimno precizno pozicioniranje vozila u moru a sa svrhom preciznog čitanja položaja objekta na morskom dnu. SVP je sensor koji mjeri brzinu zvuka u vodi, temperature i pritisak. TSS magnetometer za otkrivanje metalnih objekata zakopanih u morskom dnu. Informacije koje senzori prikupljaju se optičkim kabelom koji je dio tethera šalju na površinu gdje postoji cijeli odjel zadužen za obradu istih (Survey department).
Osim senzora na podvodno vozilo se može priključiti I jako puno alata, najčešće za poslove na plinskim i naftnim poljima, te raznih podvodnih rezača, alata za čišćenje, pumpi za produbljavanje morskog dna, itd.
Pogon
Podvodno vozilo (ROV) može biti pogonjeno električnim ili hidrauličnim pogonom čije napajanje dolazi sa površine preko kabela. Pogone ga propeleri (thrusters) koji mu omogućuju kretanje u svim smjerovima (gore, dolje, lijevo, desno I okretanje u smjeru kazaljke na satu i suprotno). Najčešće se sastoji od 7 ili 8 propelera od kojih su 4 za lateralna kretanja a 3 ili 4 za vertikalna kretanja. Propelere pokreću hidraulične ili električne pumpe (ovisno o vrsti Sistema). Najveća podvodna vozila imaju motore snage i do 300 konjskih snaga i mogu neprekidno raditi pod morem tjednima.Sva radna podvodna vozila opremljena su sa dvije robotske ruke za obavljanje najzahtjevnijih I najdelikatnijih podvodnih operacija (takve iste robotske ruke se koriste npr. u nuklearnim elektranama za rukovanje nuklearnim materijalom).
Pročitajte također i povezani tekst Micro ROV
Tekst: Daniel Bolanča
Slike: Arhiva gumenjaci.com